近藤研究室
私たちの研究室では、海洋で活躍する自律型ロボット、例えば自律型水中ロボット(AUV)や自律型ボート(USV)などを用いたアプリケーション、水中のセンサシステム、ソーナーのアプリケーション、水中通信ネットワークシステムなどの研究を行っています。無人航空機(UAV)と海上、水中ロボットの連携に関する研究も行っています。
研究では様々な分野の専門家の方々と共に、分野横断的な研究プロジェクトに取り組んでいます。海洋物理学、地球物理学、海洋生物学、水中考古学、水産学、マルチメディア通信、画像・音響信号処理、集積回路等の分野の方々と現在共同研究プロジェクトを推進しています。
自律型ロボットの研究は、構造設計、電気電子回路、センサなどの要素技術、運動制御、自律機能を実現するソフトウェア、コンピュータシミュレーションなど多くの要素が揃うことではじめて価値を発揮する総合工学の分野です。やるべきことはとても多くありますが、ロボットが意図したとおりに機能して実際のフィールドで目標を達成したときには、大きな喜びが得られます。
健全な心と体の調和が人間にとって重要であるように、ロボットもソフトウェアとハードウェアが調和して機能を発揮してこそ、自律的なミッションをこなせるようになります。研究室の学生には、ソフト・ハードのどちらかに偏らず、なるべく両方を経験して全体のシステムを見通せるようになれるよう、取り組んでもらっています。
海洋をフィールドとして、未来の人類と地球環境のために実際に活躍するロボットを皆で作り上げましょう。一緒に汗を流せる日を楽しみにしています。
近藤逸人
News & Events
May 31, 2017
MEMO-pen@伊豆 大島

May 26, 2017
MEMO-penの進水式を行いました。

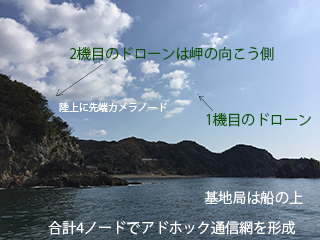
March 16-18, 2017
南伊豆の弓ヶ浜海域にて、複数のドローンによる映像マルチホップ伝送の試験を行いました。(一般社団法人日本海事検定協会、株式会社東芝との共同研究)実験協力:株式会社ウィンディーネットワーク